An dieser Stelle möchte ich Interessenten für den L6470 von STM zusammen sammeln.
Hierbei handelt es sich um einen „smarten“ bipolaren Schrittmotortreiber welcher per SPI angesteuert wird.
Die Kurzfassung vom Hersteller:
Spannung: 8 - 45 V
Spitzenstrom: 7.0 A
Dauerstrom: 3.0 A
Programmierbare Bewegungsprofile (Beschleunigung und Position)
Bis zu 128 - faches microstepping
Erkennung von blockierten Motoren
SPI interface
Programmierbare Strombegrenzung
Temperaturüberwachung
Inkrementelle Positionsüberwachung
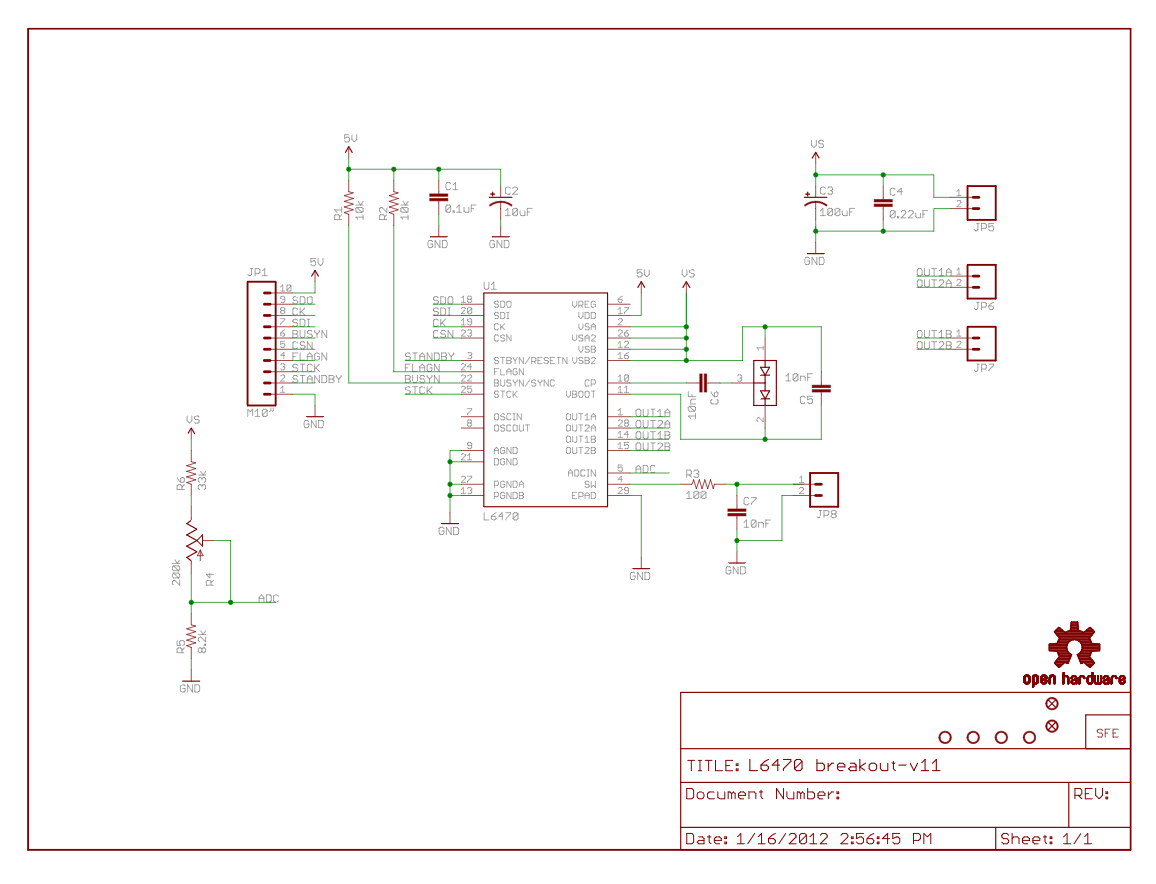
Die Chips benötigen nur wenige externe Bauteile um zu funktionieren. Dazu hier die Zeichnung von Sparkfun:
Auch eine Library und Dokumentation gibt es von Sparkfun.
Zum eigentlichen Geschäft:
Als fertiges Board kosten diese Treiber etwa 12 bis 35€ Da der Chip selbst die gesamte Arbeit macht lohnt es sich diese „roh“ zukaufen und in Projekten einzusetzen.
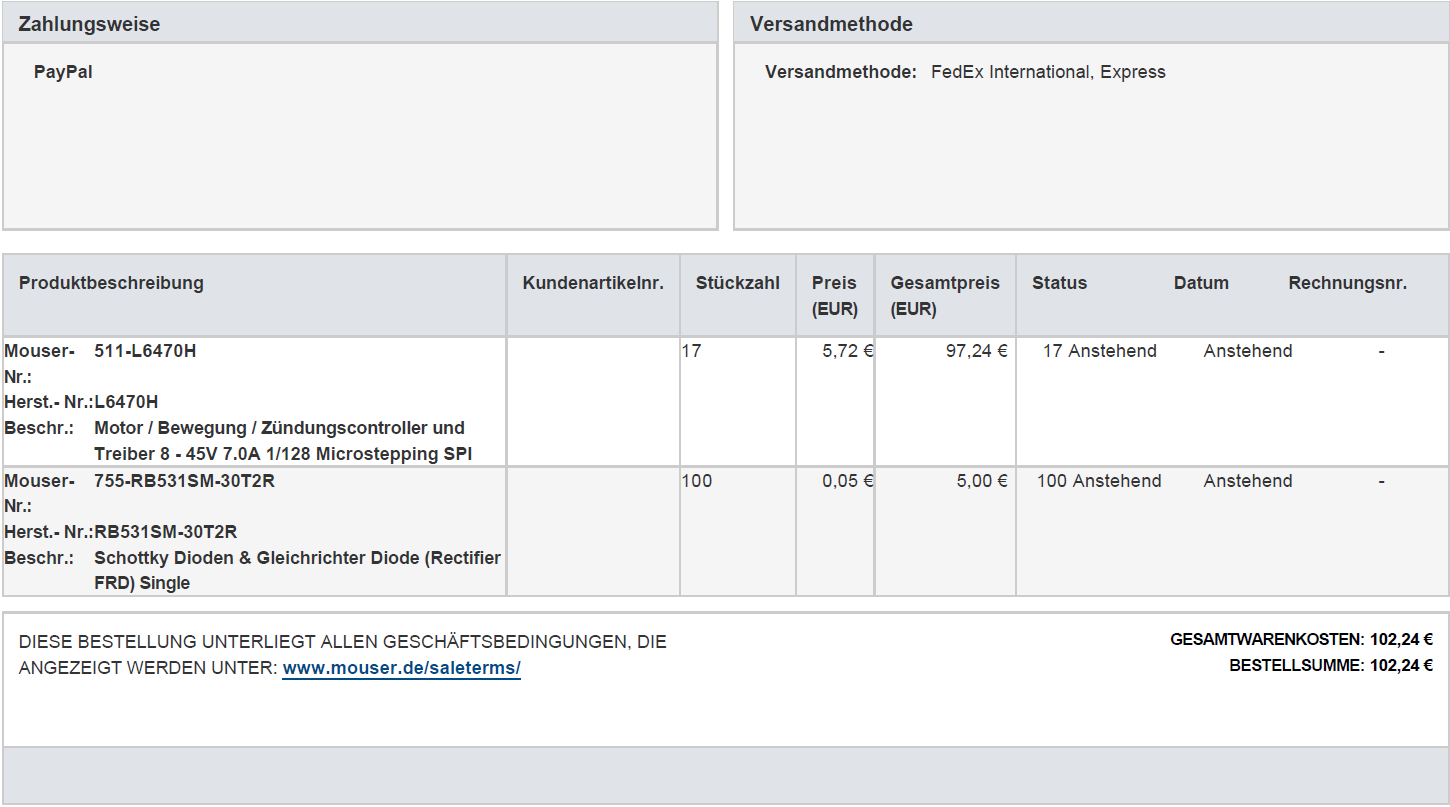
Bei Mouser (https://www.mouser.de/ProductDetail/STMicroelectronics/L6470H?qs=sGAEpiMZZMuP%2FQeRSdvksPGSQkvtk%2FGb) Ist ein einzelner Chip für 6,33€ erhältlich, Ab 10 sind es nur noch 5,72€ und ab 25 Stück 5,45€
Wenn die Bestellung groß genug ist kann hier ordentlich gespart werden.
Bei Interesse einfach mal hier schreiben wie viele ihr haben möchtet. Wir werden diese oder nächste Woche bestellen.
Ich würde gerne morgen bestellen so das die Chips hoffentlich schon am Freitag da sind.
Momentan sind es 17 Stück. Falls noch jemand welche braucht gebt schnell bescheid. Noch 8 mehr und es wird für alle billiger.
Okay die Bestellung ist aufgegeben.
Zum betreiben des Chips sind, wie im Schaltplan gezeigt, zwei Schottky Dioden nötig. Bei den Kondensatoren und Widerständen gehe ich davon aus das ihr derartiges schon zur Verfügung habt.
Demnach kostet euch ein Chip (mit den zwei Dioden) 5,82€.
Ian: 11,64
Martin: 29,10€
Den Rest übernehme ich, und auch die übrigen Dioden gehen in mein Lager.
Wer wann wie bezahlt klären wir demnächst.
Und ein kleines Beispiel des ersten funktionierenden Prototypen:
Beim starten wird die momentane Position als „Home“ gespeichert. Danach laufen folgende Befehle (mit delay dazwischen) ab:
goTo(800);
goTo(1600);
goHome();
goTo(-800);
goTo(-1600);
goHome();
mit dem goTo Befehl bewegt der Controller den Motor an eine absolute Position X Schritte von der Home Position entfernt. Warum 800 Schritte für 90°? Der Motor hat 200 Volle Schritte, benutzt aber 16-faches Microstepping, was 3200 Schritte für eine volle Drehung bedeutet.