Moin zusammen!
Dieses Thema soll zur Anregung dienen und mir evtl. mit Eurem Schwarm-Wissen helfen!
Die Sumobot Competition 2019 steht vor der Tür und ich durfte mich schon diese Woche davon überzeugen, dass es einen richtig guten Sumo-Ring für das Event gibt und ich habe schon einen Roboter in Aktion gesehen. wow! 
So etwas bestärkt mich dann auch etwas in zwei Wochen auf die Beine zu stellen, was sich mit anderen messen kann. Wenn ich es bis zum 7.Januar am laufen habe melde ich mich noch an (8. Januar ist Anmeldeschluss), ansonsten baue ich das Ding fertig und benutze es als Kinderspielzeug.
1. Was soll der Roboter können?
- nicht mehr als 1,5kg wiegen
- Kettenantrieb haben
- Autonom fahren und Gegner erkennen
- fast nichts kosten
- (die Weltherrschaft erlangen) das lieber nicht…
2. Was habe ich an Equipment? 
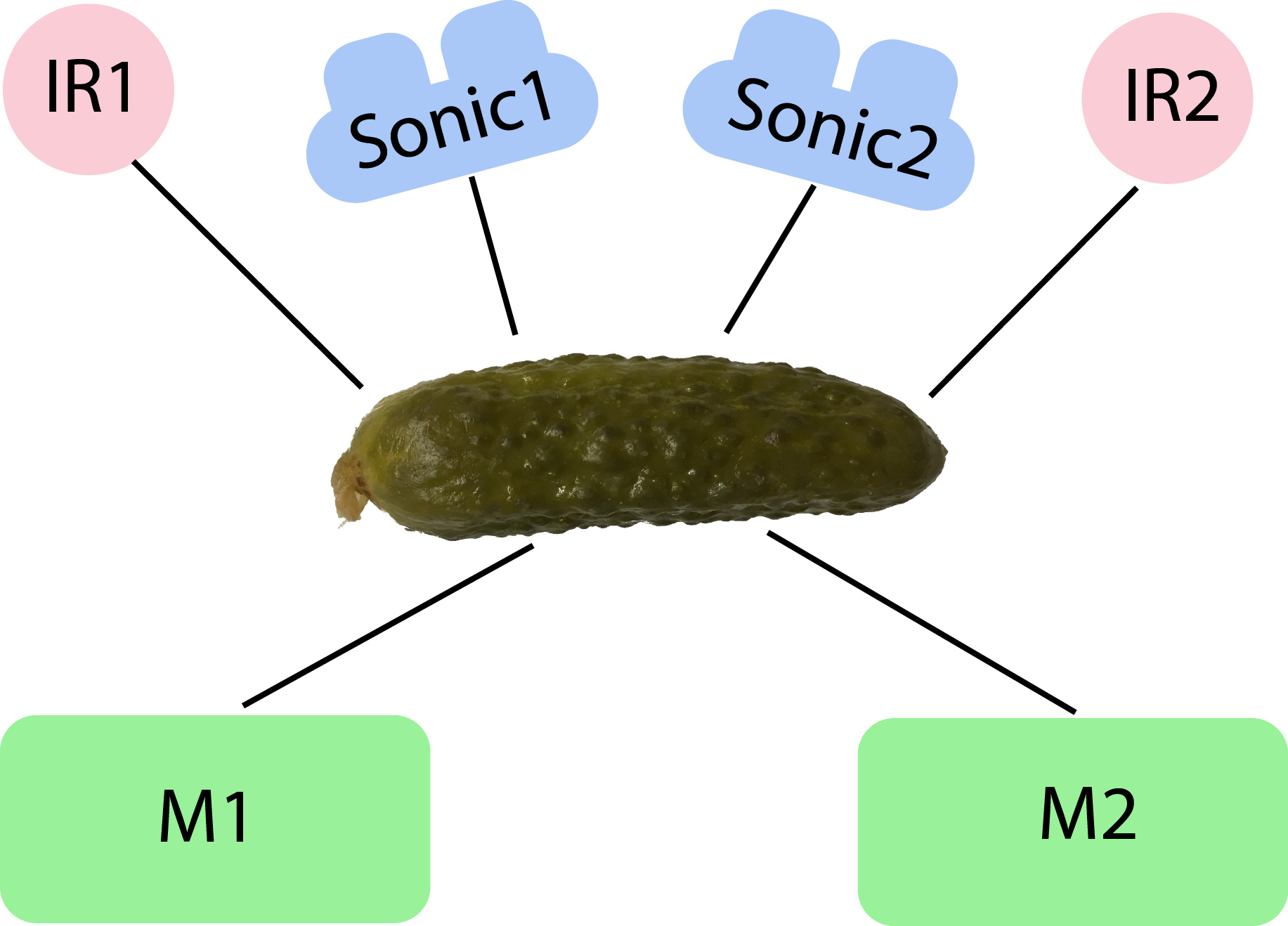
- zwei bis drei HC-SR04 (Ultraschallsensoren)
- zwei bis vier IR-Reflextions-Lichtschranken-Module (basierend auf TRCT5000)
- zwei starke Getriebemotoren 12V bei 250U/min
- einen Motortreiber (basierend auf dem L298N)
- ein Arduino Mega oder UNO
- einen 14V Lithium-Akku (die Spannung werden der Motortreiber und die Motoren überstehen)
3. Was fehlt mir? 
- ein Chassis
- Kettenantrieb
- evtl. Zeit
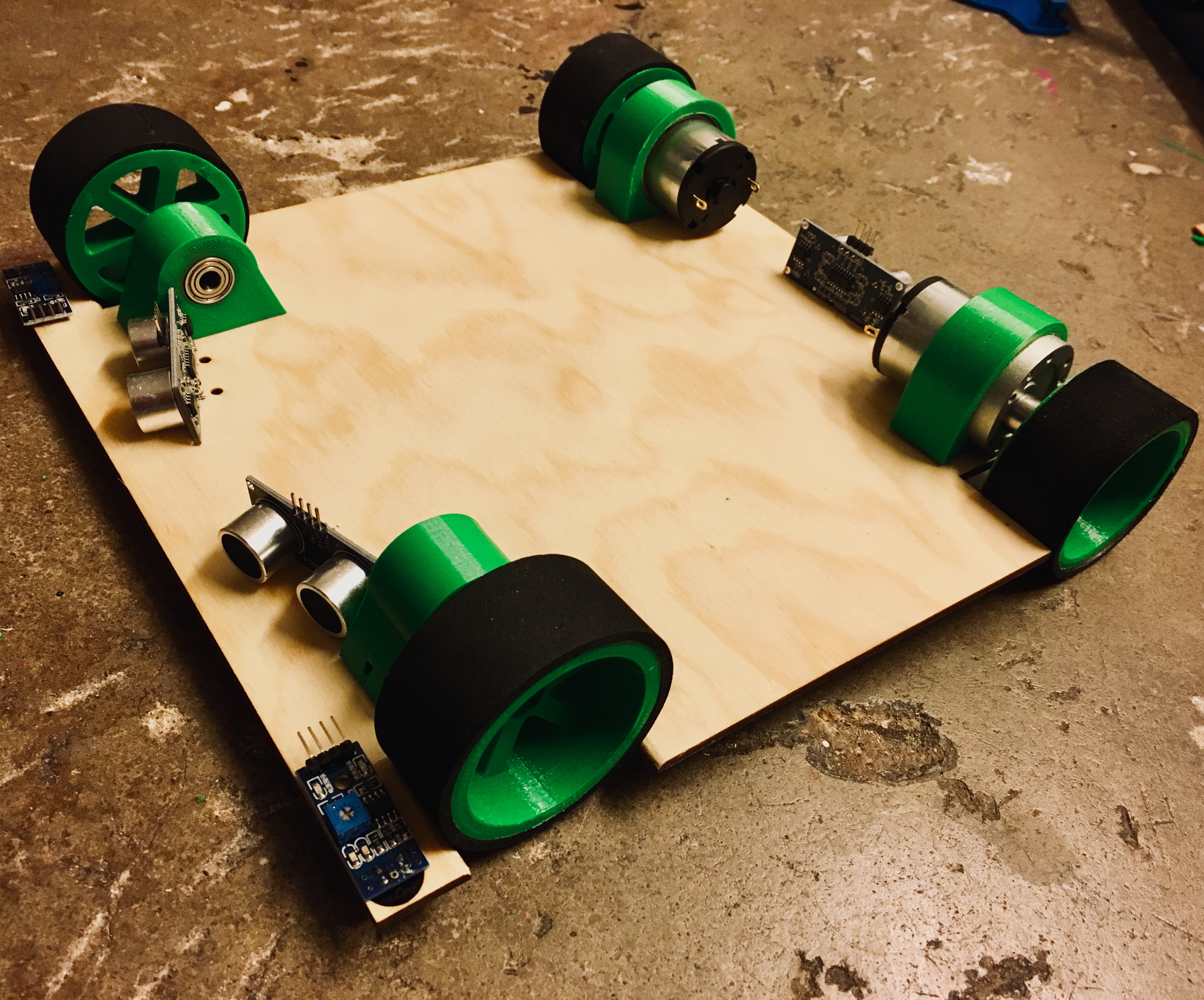
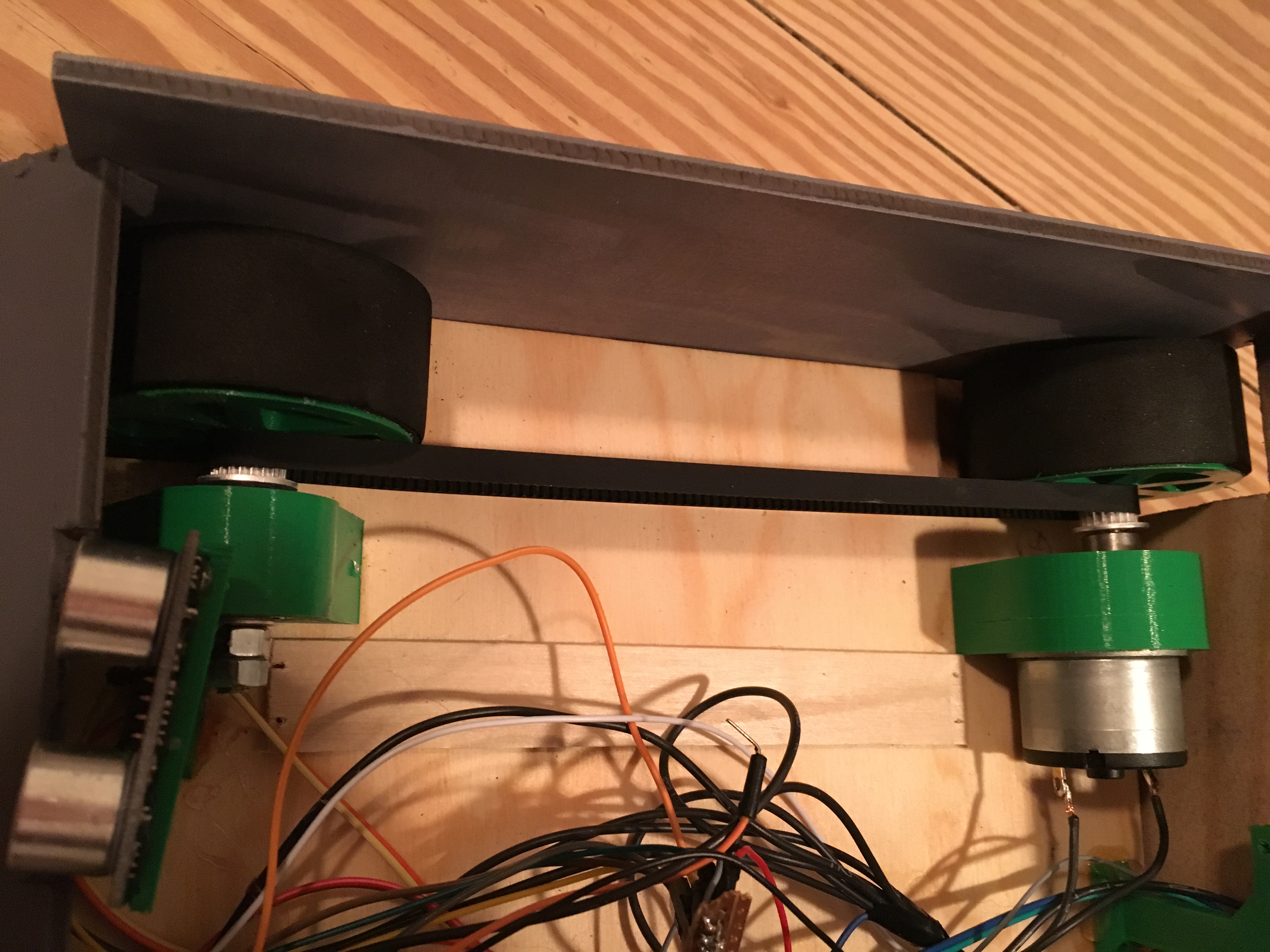
Nachdem ich die Teile zusammen habe mache ich mir Gedanken zum Aufbau und der Stabilität im Sumo-Einsatz. Kettenantrieb wird es wohl nicht, dafür brauche ich zu viele Teile. Damit ich trotzdem eine gute Bodenhaftung und Stabilität hinbekomme, baue ich einen quadratischen Grundrahmen, der von vier Rädern bewegt wird. Jeweils zwei Räder einer Seite sollen über einen Zahnriemen synchronisiert werden. Somit sollte der Drehpunkt des Roboters im Zentrum des Grundrahmens liegen.
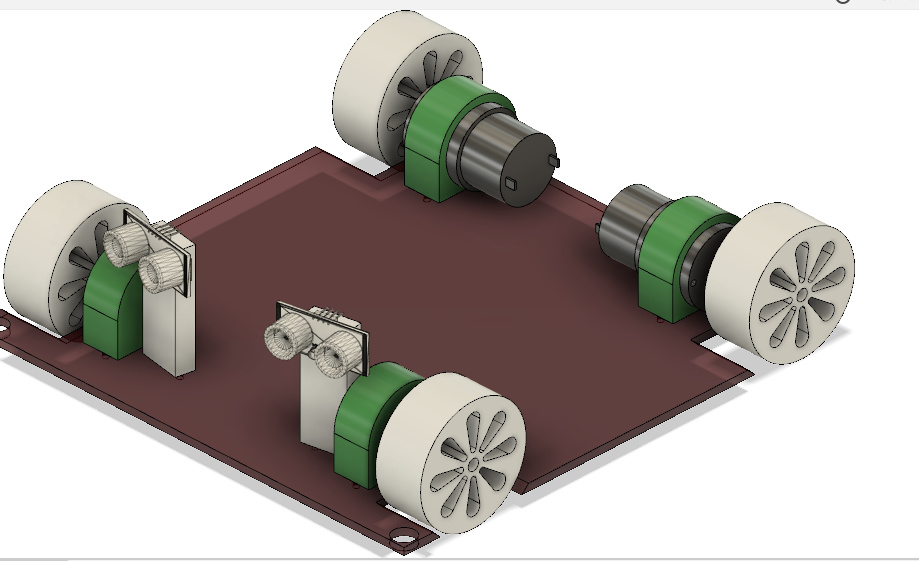
Das ist die Grundidee der Bodenplatte. Hinten sitzen die Motoren mit den grünen Motorhaltern und vorne die Radnabenhalter und die Ultraschallsensoren (HC-SR04).
Die HC-SR04 habe ich in einem Winkel von jeweils 10° nach rechts und links angeordnet und erhoffe mir dadurch Gegner „räumlicher“ erfassen zu können. Durch die Charakteristik des Sensors müsste der Roboter somit ein „Sichtfeld“ von ca. 50-60° erhalten.
Hier eine Idee zum Radbau:
Diese kam mir als ich nach Rädern bei Modellbau-Händlern stöberte und ich Leichtbauräder mit Moosgummi-Bereifung fand. Das kann man doch auch selber machen! 

Benötigt werden 3D-gedruckte Felgen , Moosgummi, Kontaktkleber (Patex), eine Schere und Schleifpapier.
Die Felgen entsprangen Fusion 360 und meinem 3D-Drucker, evtl. lasst Ihr Euch die im FabLab drucken und den Bogen Moosgummi gibt es in hiesigen Hobby- und Bastelgeschäften. Einen Streifen Moosgummi (Felgenbreite mal Umfang) und eine Felge mit Kontaktkleber bestreichen, ein paar Minuten den Kleber ausdünsten lassen (wenn der Kleber nicht mehr am Finger klebt) und beide Teile kurz fest aufeinander drücken. Fertig!
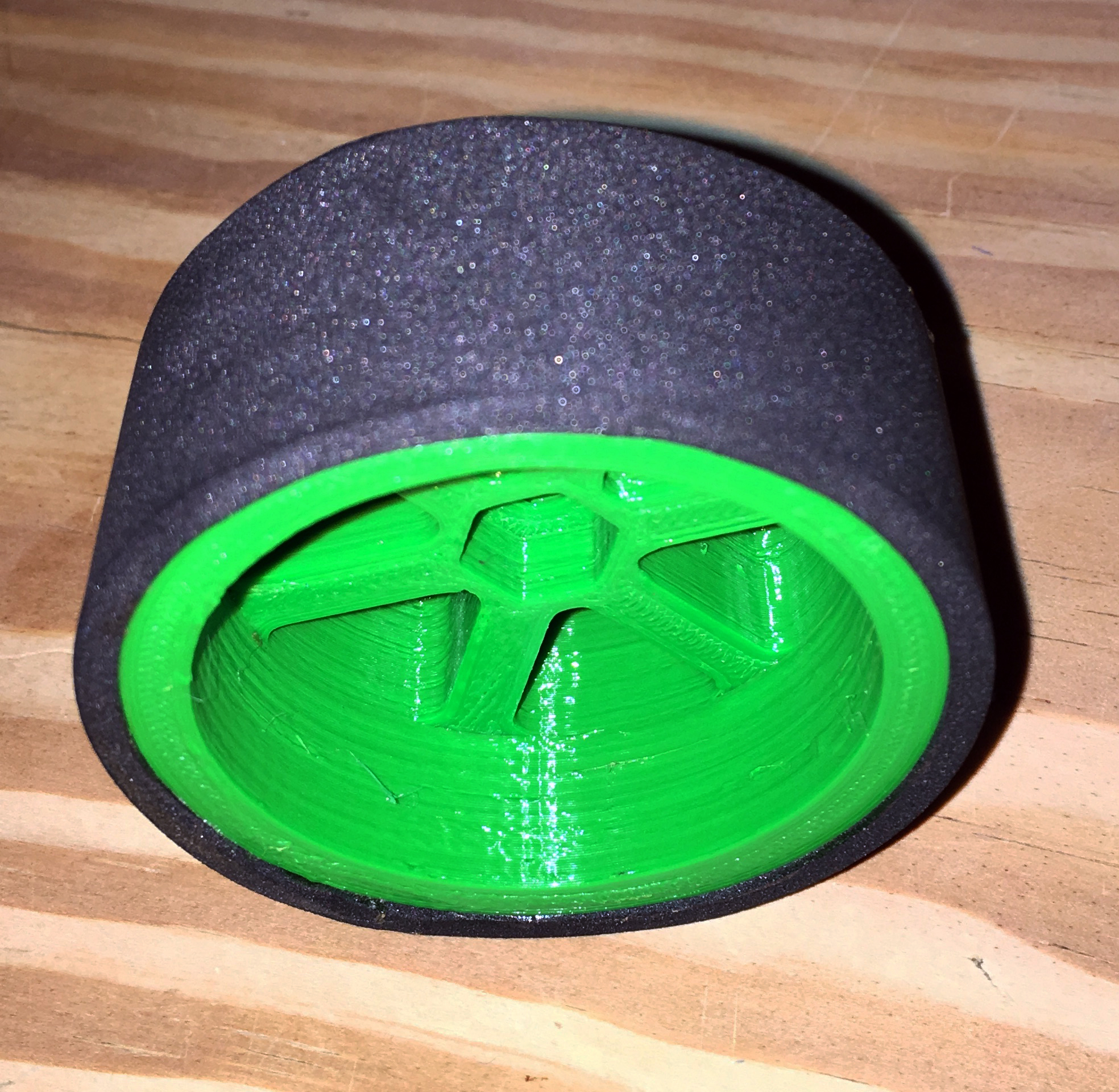
Damit die Räder auch etwas mehr Griff bekommen, habe ich die Oberfläche mit 120 Schleifpapier aufgeraut.
Wenn Ihr noch ein paar gute Ideen habt, dann immer raus damit! Vielleicht kann mir noch jemand sagen, wie ich Zahnriemen zusammenfügen kann, oder ich mir lieber gleich fertige kaufen sollte. Früher hatte man Riemen aus Leder vernäht, vernietet und verklebt.
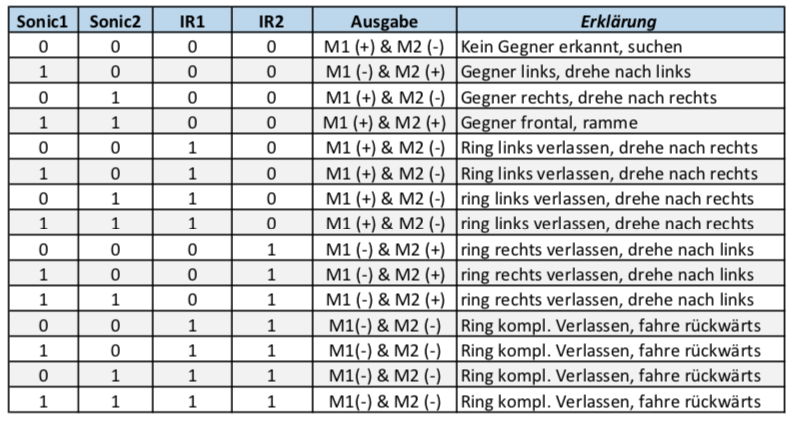
 spielen wir mal die Fahrt durch und beziehen uns auf die Tabelle die ich gepostet habe.
spielen wir mal die Fahrt durch und beziehen uns auf die Tabelle die ich gepostet habe. erkennt den inneren Poller als Gegner und macht sich nun auf den Weg, diesen zu treffen. Dann wird er vorher die schwarze Linie überfahren und sofort springt eine der IR-Reflexlichtschranken an. Der mechanische Sumo-Held wird nach seiner Programmierung drehen und wieder, wenn die Lichtschranken Ihn frei geben sich auf den Weg machen. Ich habe die Lichttschrankenfunktion dominanter als die Hinderniserkennung im Programm.
erkennt den inneren Poller als Gegner und macht sich nun auf den Weg, diesen zu treffen. Dann wird er vorher die schwarze Linie überfahren und sofort springt eine der IR-Reflexlichtschranken an. Der mechanische Sumo-Held wird nach seiner Programmierung drehen und wieder, wenn die Lichtschranken Ihn frei geben sich auf den Weg machen. Ich habe die Lichttschrankenfunktion dominanter als die Hinderniserkennung im Programm.
 begleiten möchte.
begleiten möchte.


 Meine Vermutung ist, dass der Winkel in Verbindung mit der Oberflächenbeschaffenheit die Ultraschallwellen abgelenkt hat und somit keine Echo gemessen werden konnte.
Meine Vermutung ist, dass der Winkel in Verbindung mit der Oberflächenbeschaffenheit die Ultraschallwellen abgelenkt hat und somit keine Echo gemessen werden konnte. Setzen und Hefte raus! (warum erinnert mich dieses Emoticon an Collin Furz)
Setzen und Hefte raus! (warum erinnert mich dieses Emoticon an Collin Furz)