Nach einer erfolgreichen Titelverteidigung und einem wunderschönen Abend (tausend Dank an dieser Stelle an alle beteiligten Helferinnen und Helfer) bei der Sumobot-Competition 2019 wollen wir hier auch noch einmal unsere Überlegungen sowie den Entstehungsprozesses unseres Bots offenlegen! Kurz vorweg: Alles, was wir bei uns aus dem 3D-Drucker (Ultimaker S5) gezogen haben, könnt ihr hier als STEP-Datei runterladen und nachbauen/an eure möglichen Projekte anpassen.
DonQuiBote.zip (929,2 KB)
Die Idee:
Nachdem der Bot Crusher bereits 2018 im Ring überzeugte, entschieden wir uns dazu das Konzept weiterzuentwickeln und ein optimiertes Modell àla Bot Crusher in die Arena zu schicken. Also: Kippen Grip Wendigkeit. Mit erhöhtem Gewichtslimit und keiner Begrenzung bezüglich der Energieversorgung stürzten wir uns in…!
…Die Konzeptphase:
Antrieb: Mit der neu gewonnenen Möglichkeit LiPos einzusetzen und nicht auf 9 V Blöcke angewiesen zu sein stand relativ schnell fest, auch statt Getriebemotoren Brushless Motoren zu verwenden. Brushless motoren kann man übrigens auch drucken…. Schaut mal hier. Wir haben die dann aber doch lieber vom Elektronikhändler des Vertrauens besorgt.
Die Drehzahl von Brushlessmotoren wird in der Regel als kV (nein nicht Kilovolt) angegeben. kV beschriebt die Umdrehungen pro Minute pro Volt des Motors. Wir haben uns für 1000kV bei 2-3 Zellen entschieden. Das ist nicht so viel Drehzahl für Brushlessmotoren hat dann aber auch schon ein ganz vernünftiges Drehmoment. Mit 2-stufigen Planetengetrieben von Legotechnik (Untersetzung von ca. 15) haben wir dann eine geeignete Antriebseinheit zusammengestellt.


Als Ketten haben wir alte Legotechnikreifen einfach „langgezogen“. Die sind dann doppelt so breit wie die Ketten des Bot Crushers und aus Weichgummi. Perfekte Haftung also!
Kettenräder und Motorbefestigungen haben wir aus dem 3D-Drucker gezogen und mit Hohlstäben aus Aluminium und Modellbaukugellagern im Chassis befestigt.

Um die Ketten zu spannen haben wir mehrere Plättchen konstruiert um die Achsabstände zu variieren.
Um euch auch an unseren Lessons learned teilhaben zu lassen hier mal ein paar key-points zur Antriebsfindung:
- Brushlessmotoren brauchen Regler und für so einen Bot sollte man unbedingt auch gucken, dass das auch Fahrtenregler und keine Flugregler sind. Sonst geht’s nur in eine Richtung
- Du hast das Getriebe erfolgreich demontiert aber das Sonnenrad ausversehen zerstört? (Jo haben wir hingekriegt) Druck dir das Ding aus deinem Lieblings-3D-Drucker. Funktioniert super!!! Tough PLA 100% Infill 0,15 mm Layerhöhe mit einer 0,4 mm Düse Modell im Ordner.
- Bei Kettenantrieb einen Moment drüber nachdenken wo vorne ist und welche Seite das Lasttrum und welche das Leertrum ist. Lasttrum zum Vorwärtsfahren immer unten

Kippmechanismus: Um gegnerische Bots erfolgreich aus der Arena zu schieben wurde wie bereits beim Bot Crusher ein Schild eingeplant, dass über einen kraftvollen Servo bewegt wir. Im Gegensatz zum Bot Crusher wurde das Drehgelenk des Schildes weiter nach unten gelegt, um so einen größeren Kippwinkel zu erreichen. Außerdem wurde das Schild wie bei einem Bulldozer steiler gestaltet um ein „überfahren werden“ zu vermeiden. Das Schild wurde 3D-gedruckt und anschließend mit einem CFK-Gewebe überzogen, um eine maximale Steifigkeit bei minimalem Gewicht für das Schild zu erzielen. Für die Kippbewegung haben wir einen sehr starken Servomotor eingebaut, der mit 200 g auch zu den schwersten Teilen des Bots gehörte.
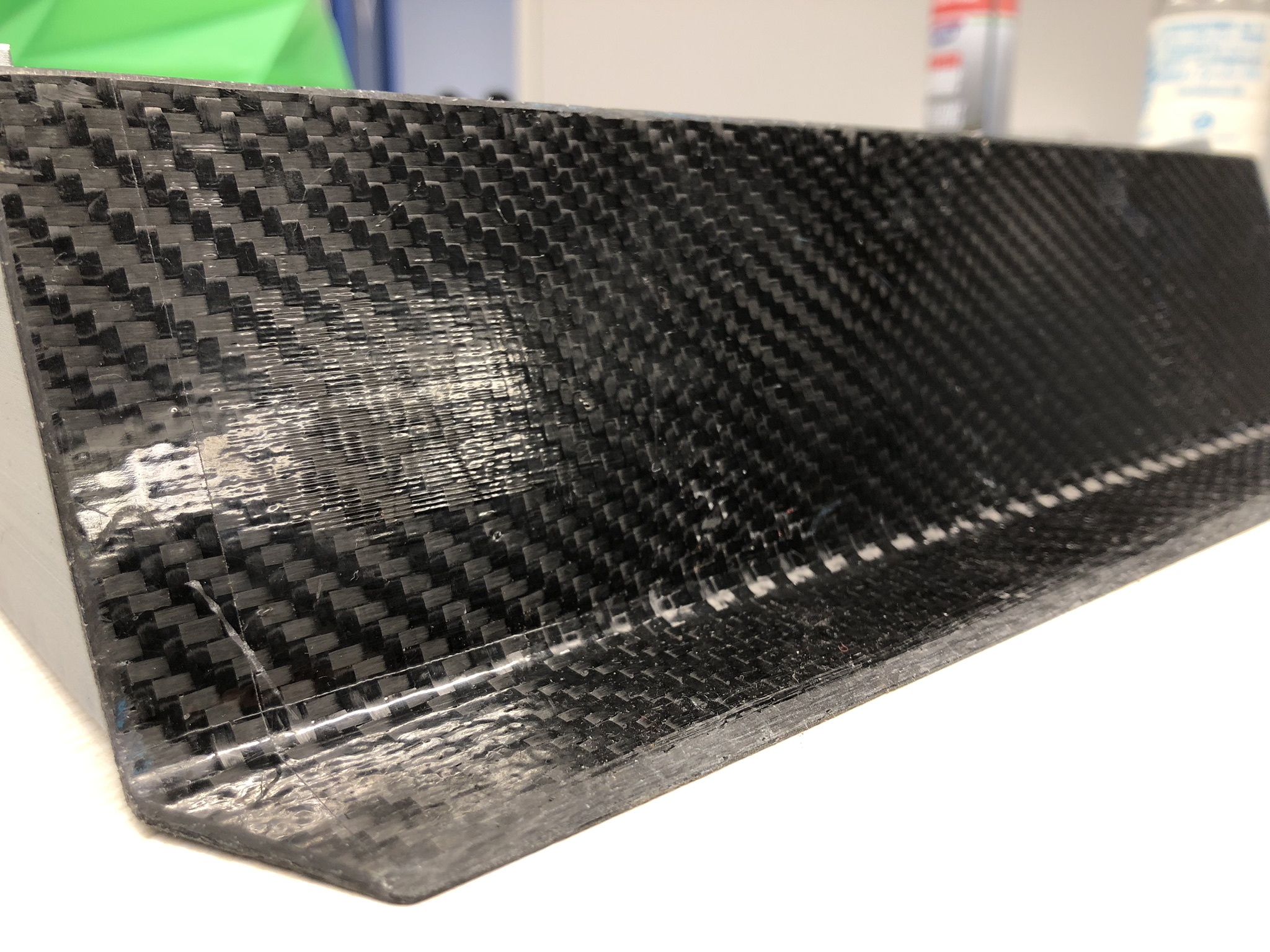
Hier das CFK-Schild
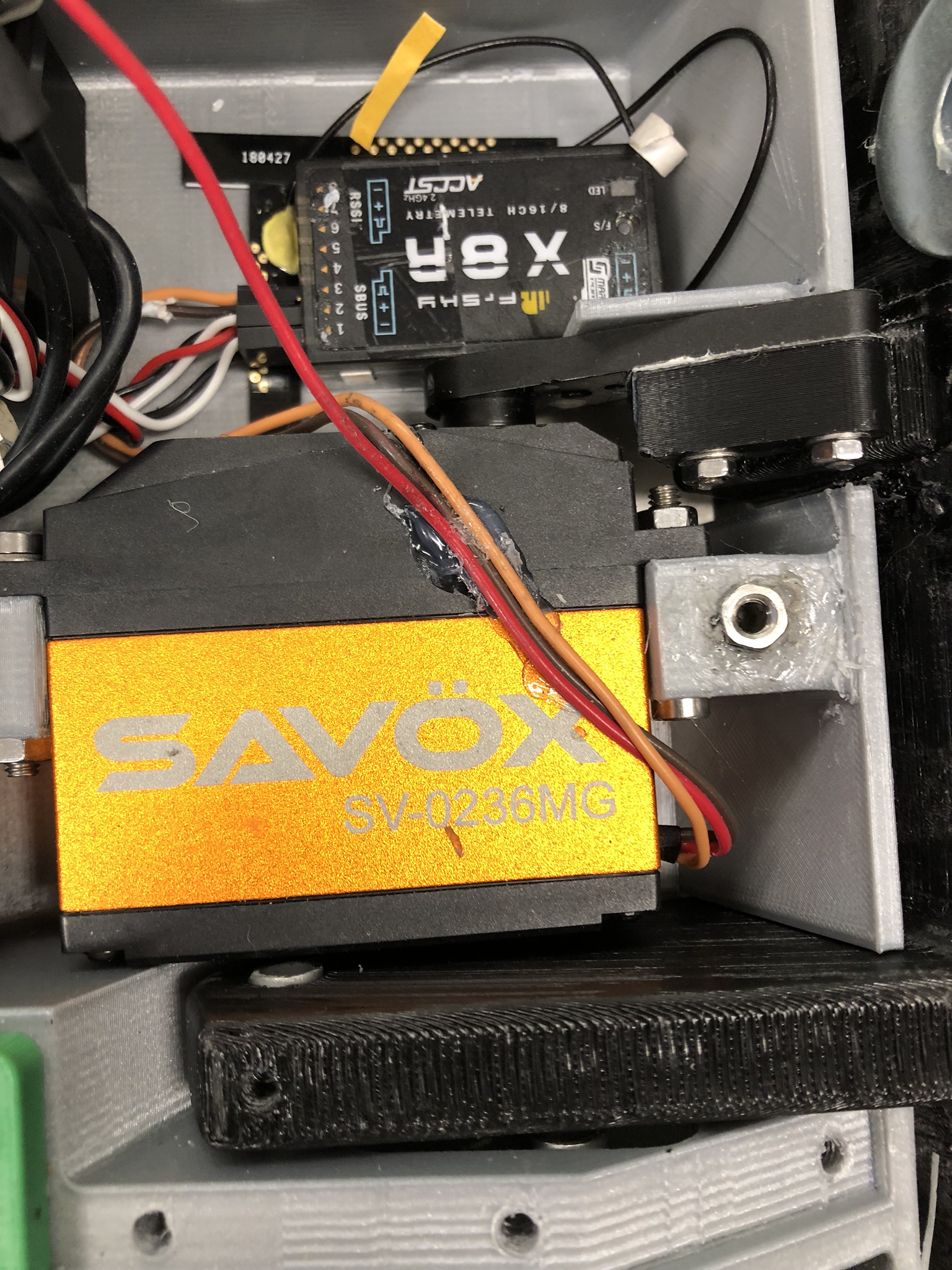
Hier der Power-Servo
Schutz: Um von anderen Bots nicht angehoben werden zu können haben wir rund um die Karosserie ein Schutzschild kardanisch aufgehängt, das so ermöglicht, dass das Chassis immer am Boden bleibt und die Ketten immer Kontakt haben und so ein ausreißen möglich ist.
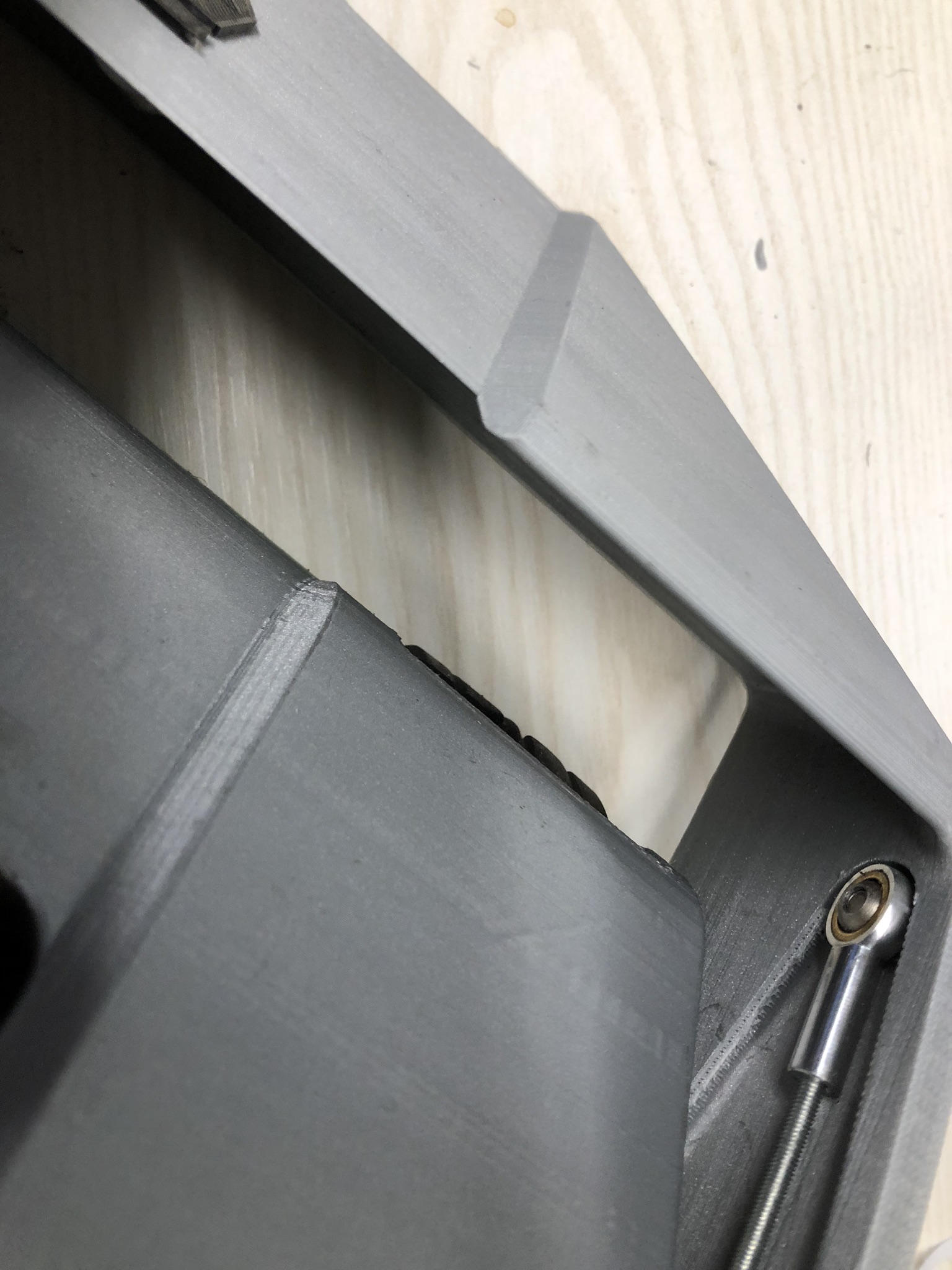
Schutzverkleidung mit Gelenkköpfen
So das reicht jetzt auch an Beschreibung!
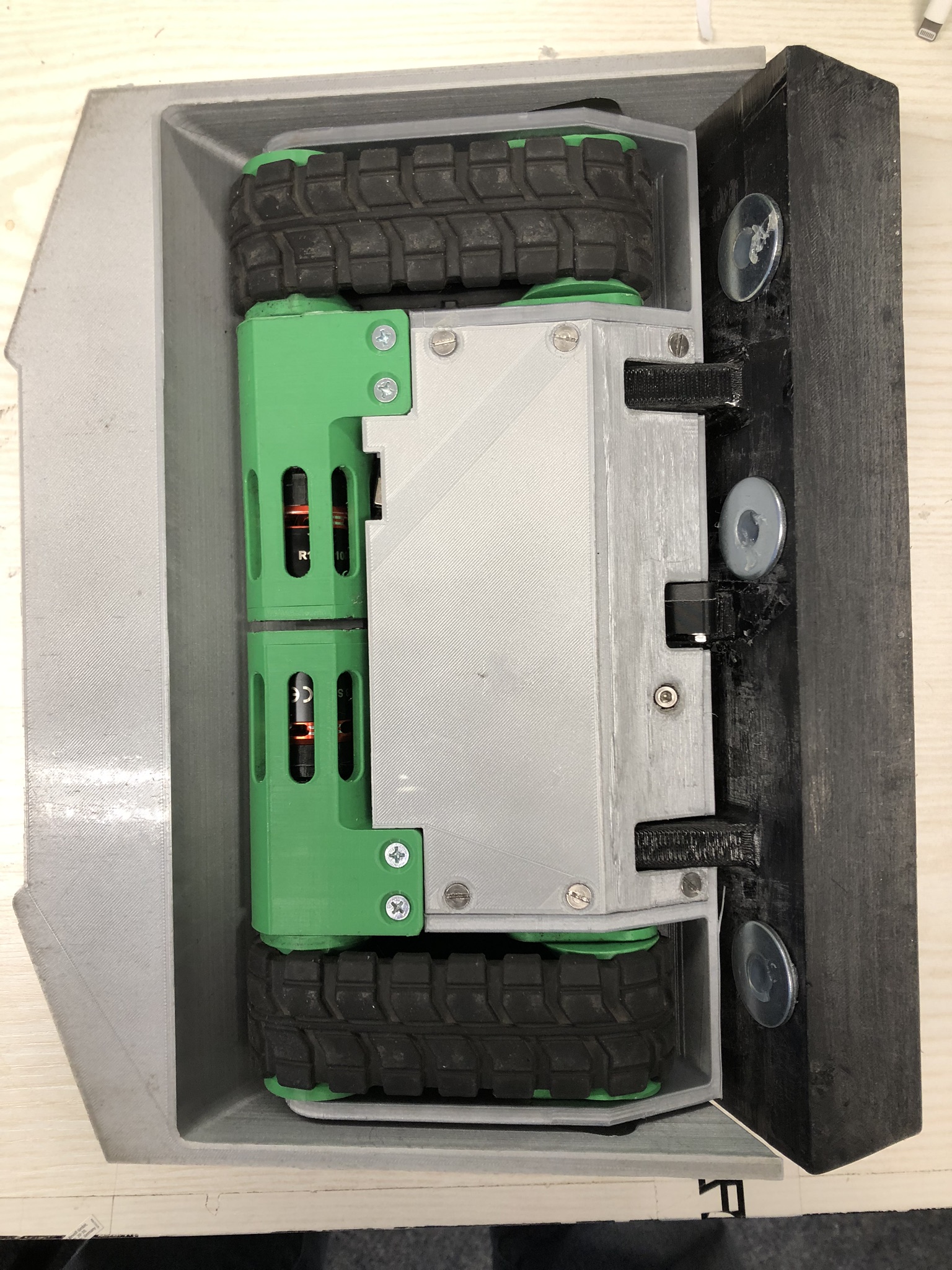
Noch einmal ein Blick von unten… die Unterlegscheiben haben wir am ende nur drunter geklebt, damit das Schild auf dem Boden aufliegt (und wir hatten noch ein paar Gramm Luft 
Viel Spaß beim Nachbauen und bis nächstes Jahr in der Arena!
Bei Fragen natürlich gerne melden!!
Das Greif-Velox Team