Hier der Bereich für das Team Hand, Unterarm und Oberarm.
Da sich für den Oberarm bisher noch niemand eingetrage hat, habe ich ihn einmal in diese Gruppe mit eingefügt. Das ist aber natürlich kein Muss
Ich habe einmal die ensprechenden Anleitungen der InMoov Seite herausgesucht. In meiner Bachelorarbeit habe ich viel mit unterschiedlichen Fingermechanismen experimentiert und kann euch meine Ergebnisse gerne einmal zeigen @susesKaninchen hat ja bereits angesprochen, dass man ein Kraftfeedback in den Fingern realisieren könnte. Hierfür müssen wir so oder so die Finger des Grundmodells anpassen und die Kabel entsprechend weiterführen. Am einfachsten können wir uns hier vermutlich beim Teammeeting direkt besprechen.
Wir müssen uns natürlich nicht an die genaue Anleitung halten. Diese dient nur als Anhaltspunkt. Eigene Ideen und Vorschläge sind immer gerne gesehen =)
Am Besten versuchen wir im Team einen festen Rythmus zu finden, in dem wir uns treffen möchten.
Wir sind natürlich nicht fest an den Termin/Rythmus gebunden. Wenn Projektarbeiten oder die Klausurphase anstehen können wir immer noch etwas neues festlegen. Der Spaß am Projekt steht schließlich im Vordergrund
Hier also noch mehr der tollen Umfragen
Umfrage Wochentag
Montag abends
Dienstag abends
Mittwoch abends
Donnerstag abends
Freitag abends
Samstags
Sonntags
0Teilnehmer
Umfrage Rythmus
Mehr als 1x die Woche
1x die Woche
Alle zwei Wochen
Alle drei Wochen
Einmal im Monat
0Teilnehmer
Möchtest du eine 3D-Drucker Einweisung erhalten
Aber klar!
Nein das interessiert mich nicht
0Teilnehmer
Dieser Bereich ist dazu gedacht, dass sich das Team untereinander austauschen und über mögliche Lösungen, Sensoren, etc. diskutieren kann. Also viel Spaß =)
Hier kommt es ganz darauf an ob wir eine Verbindung mit einem festen Radius oder eine adaptive Verbindung realisieren.
Bei der festen Verbindung sind alle Fingerglieder miteinander gekoppelt. Das bedeutet, wenn sich das untere Fingerglieder um x Grad dreht, drehen sich die oberen immer um genau y Grad.
Dies ermöglicht eine höhere Stabilität im gestreckten Zustand des Fingers allerdings können sich die einzelnen Glieder nicht an die Gegebenheiten des Objektes anpassen und hierdurch kann es leichter aus der Hand rutschen.
Bei diesem System könnte man die Kraft natürlich direkt mit Dehnungsstreifen messen.
Bei der adaptive Verbindung können sich die einzelnen Fingerglieder an das Objekt anpassen und sind entsprechend nicht durch einen festen Radius verbunden. Daher kann auch eine hohe Kraft aufgebracht werden und das obere Fingerglieder beispielsweise noch gestreckt sein. Hier wären Piezo Kristalle vermutlich die bessere Wahl
Piezo Kristalle sind billig, aber nehmen nur die Veränderung von Druck wahr, daher ist es bei ihnen wichtig genau zu rechnen und sie immer wieder auf einen 0Punkt zu resetten.
Ich habe fertige Piezo Gewichtssensoren gefunden, die aber leider 3,4cm groß sind. Dafür können sie bis 50KG messen und kosten unter 1€.
Dehnungssensoren habe ich keine Erfahrung, sehen aber ganz gut aus.
Bei “meinen” Sensoren hatte ich das Problem, dass der grüne Hals im Gelenk des Fingers sitzt und das durch die Knickung der Finger der Sensor beschädigt wird.
Hast du noch kaputte davon? Dann würde ich Mal schauen ob man das braucht oder nicht, dann kann man den ganzen langen Hals durch ein Kabel austauschen und durch den Finger leiten.
Zu dem Druck-feedback habe ich mir noch eine Lösung überlegt: Kleine Luftkammern mit Luftdrucksensoren. Diese sind in SMD-Form zu erhalten und sollte man bei guter Planung & Vorgehen mit eindrucken können. Zudem sind diese eigentlich sehr robust & empfindlich.
@AndreS Das klingt sehr sehr gut, besonders, wenn wir eventuell ja nicht nur an den Fingerspitzen das Feedback haben wollen, sondern an jedem Finger element. Hast du damit schon erfahrung?
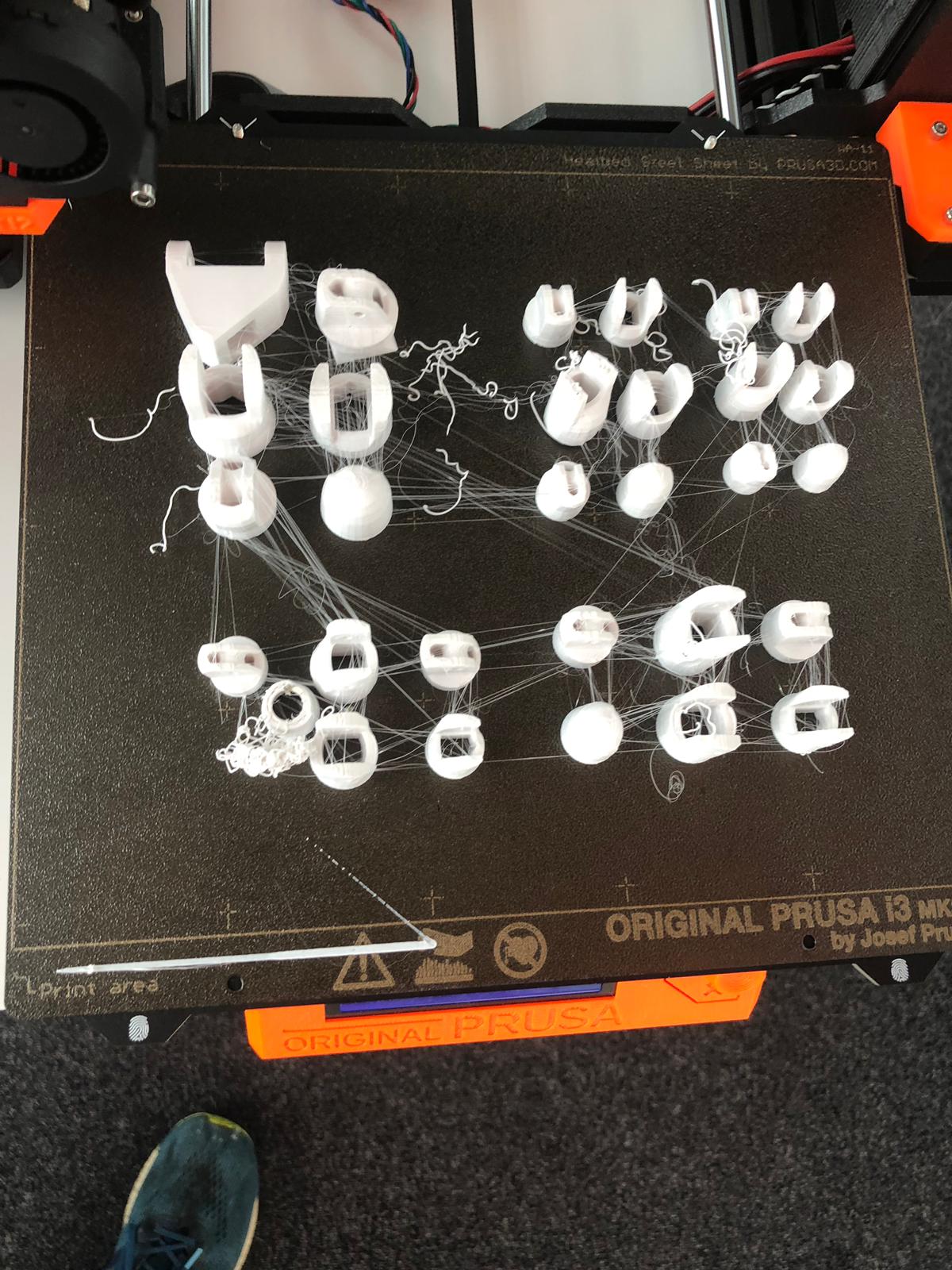
Hier noch ein paar mehr Bilder. Bei deinem Druck @Mathis sieht man das Standardproblem von neuen Rollen. Irgendwann springt das Filament herunter und wickelt sich um die Stande, sodass kein Filament mehr rauskommt. Hier könnte man Platten mit dem Lasercutter auslasern, damit das Filament nicht herunterspringen kann. @AndreS deine Drucke sehen gut aus =) @Konstantin Bei den Fingern haben wir leider ein paar Fäden. Hattet ihr sie eventuell massiv gedruckt? Gestern habe ich ein ziemlich cooles Video gefunden, dass unter anderem bei massiven Drucken die Fädenbildung erklärt: https://makezine.com/2018/10/23/how-to-print-miniature-figures-on-a-3d-printer/